Talent Show December 2010

by Jef Mangelschots
The rules for this contest can be found here.
Here are the contestants:
Contestant #1: Jim Ubersetsig with "Canbot"
Jim showed us his "CANBOT". This is an older bot he has used for many competitions like line following, can-retrieval, wall-outlet-finding and the DARPA Grand Challenge. He is pimping it up to compete in the upcoming "Find-the-can-and-move-it" contest. He added line sensors and is planning to add color-detection sensors to the gripper extensions.
The robot is driven by a BasicStamp II processor, with a whopping 26 bytes of free memory space. He is yet to find an application that uses all of it. The mechanical arm is made of expanded PVC and glued with standard Elmer's All-purpose Glue.

Jim explained the challenge of finding the can with a single range sensor. The range sensor has a narrow beam. If the target (like a can, or the legs of a chair) is narrow as well, a robot advancing in a straight line, it is bound to loose acquisition. In that case his robot stops and turns until it re-acquires the target.
The graphs below show what happens from the perspective from the robot. The top graph shows the output of the range sensor in function of the heading.
The second graph shows a travelling robot losing the target, then turning until it find it again. This process repeats until the robot is close by.
Contestant #2: Rainer Hessmer with "Tic/Tac/Toe robot arm"
Rainer Hessmer shows us his Tic/Tac/Toe playing robot. He uses the Lynxmotion robot arm which he programs in Reverse Kinematics. Calibrating he arm was not straightforward. He used the circular grid pattern as seen in the picture.
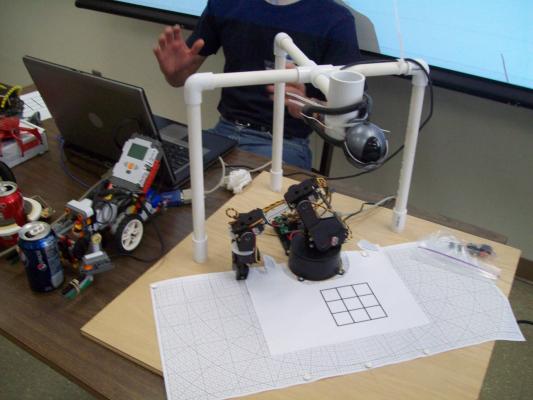

For the robot to detect the pieces, he uses an overhead web camera and processes the video stream with OpenCV to detect the grid pattern and occupation. in the C# software, he implements the game machine as a hierarchical state machine.
More information about his project can be found on his website.
Contestant #3: Thomas Messersmidt & Tim Lewis with robots "Betty9", "Melvis" and "Donationsbot"
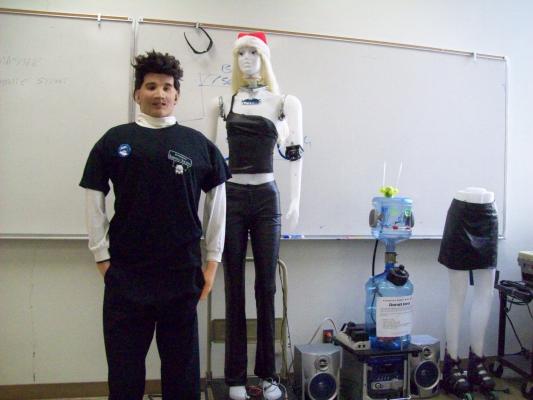
Thomas Messersmidt and Time Lewis brought in their Betty9, Melvis and Donationsbot robots.
Betty9 is an on-going entertainment robot project. In its current form, Betty9 is a styrene manequin, capable of moving arms and head. Thomas is working on mounting the torso on a set of legs that move around on rollerblades. He uses VEX motors for this. Betty9 uses a lot of the Leaf components and software. It also uses Vocaloid software to synchronize the LED mouth and the music.
Melvis is a modified Wowwee Elvis bot which Thomas and Tim are hacking up to design an "Elvis control kit". This kit is meant for robot builder to get complete control over all motors and sensors in the Elvis head.
The idea for Donationsbot came out of the Riverside robot Expo, which Thomas organized. Nobody wanted to volunteer to ask for donations from the Expo visitors. The idea came to build a robot that can squeeze the dough from the visitors. In its current form, it detects coins being inserted in the bot. Various LED gadgets liven up the experience. The audience came up with some more effective ways of having a robot extracting monetary objects from visitors, but they were all deemed inapproriate and illegal.

Contestant #4: Martin Mason with "Ballerinabot"
Martin Mason came in with the Ballerinabot. His main goal with this robot was to design a mini-Leaf robot, that does not require a truck to haul around. For that purpose, he collected some components and this is the result:
The base moves around on a VEXplorer. The interface is a toy dog. that he thaught how to speak. Here is a link to an earlier attempt. Wherever he gets a chance, Martin prefers to interface his sensors and devices with a USB-to-TTL converter. Everything attached via velcro. Like Betty9, Martin borrows heavily from the Leaf project. The heart&brain of the system are little netbook computer to which he connects to over an Ad-Hoc mode network. This allows you to make a direct connection between 2 wireless network clients, without the need for a router.

This robot is very popular with grade-level school kids. The robot immediately draws the attention and interacts with the kids in free conversation. The AI techniques used here is the very complicated "Wizard of Oz" algorithm.
Contestant #5: Phil McCarry with robots "Snackbot" and "Line Follower"

Phil is a member of our sister club "The Riverside Robotics Society". As such, he helped organize the Robot Expo, which was a huge success. As a party gimmick, he put together a Snackbot. The purpose is to drive around a crowd, with a bowl full of snacks and junkfood, and allow people to grab their share of calories.
The result of this became Snackbot. The "snack dispensing unit" is cleverly constructed out of a plastic bowl, glued ontip of a PVC pipe, mounted on top of an iRobot Create robot base.
His critique of the platform is that it requires a very specific bootloader, which only works with a very particular version of WinAVR (not the latest).
Phil also made his own homegrown line-follower robot, modeled after the Pololu 3Pi.
He uses the Orangutan controller, Plastic gear motors, QTR line sensors and a Blue Lipo 1000mAh battery.


Contestant #6: Dan Mornis with "SecureBox"

Dan Mornis put together a "Securebox", a box with highly sofisticated gadgets to prevent the CIA, Al Qaeda and your wife to snoop through your stuff.
He equipped it with an RFID reader, laser detectors, temperature sensor, light sensor, solar powered battery.
And the winners are ...
All the contestants get a complementary copy of CIRCUIT CELLAR and a full licensed copy of RoboRealm.
This audience gave every contestant grades in the following categories: Electronics, Mechanics, Software and originality. The grades for Electronics/Mechanics/Software were averaged out.
We picked a 1st and 2nd place for the categories: Technical Merrit and Originality.
For technical Merrit, the 1st place went to Rainer Hessmer. The 2nd place went to Thomas Messersmidt/Tim Lewis.
For originality, the 1st place went to Tomas/Tim and the 2nd place went to Rainer.
All winners could select their prize out of our treasure chest.
For winning the first prize in Technical Merrit, Rainer chose the USB Logic Analyzer fro mSaelig.
For winning the 2nd prize in Technical Merrit, Thomas and Tim selected the SB022S USB Servo motor controller from SCON.
For winning the first prize for Originality, Thomas and Tim selected an OLLO Bug kit.
For winning the 2nd prize for Originality, Rainer selected the Wowwee Mini Roboquad.
All contestants got a complementary copy of Circuit Cellar - Special Robotics issue, and a ful license of Roborealm vision software.