December 9th, 2011
Class
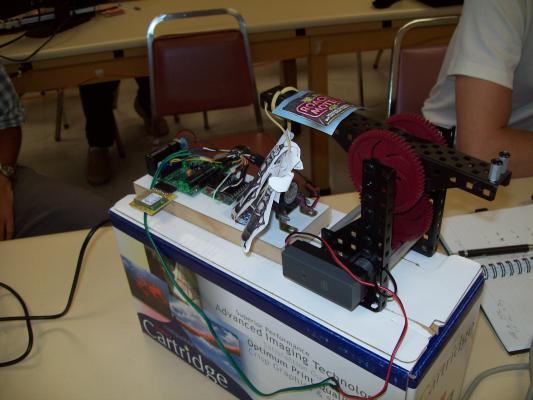
We held an Arduino workshop under the guidance of Martin Mason.
- Wiki on Arduino
- Arduino homepage
- Arduino development environment
- A good all-purpose Arduin board to get started with ins the Mega
- build your own Arduino
Arduino boards come in all shapes, sizes & Prizes. Every self-respecting robot parts vendor has some Arduino product to offer.
Business
A suggestion was made to write a list of Show & Tell topics on the white-board: if you want to show something, write the topic on the board with the estimated time your presentation will take. This gives the moderator an idea on how to lead the meeting.
Walter has been bringing in donuts: Thank you Walter !
January class: "Getting an Animatronic head to talk", Thomas Messersmidt
February class: "Schematic Design with Eagle CAD", by Bill Douglas
March class: "PCB Design with EagleCAD", by Bill Douglas
February contest: "Firefighter", contest rules are here.
June contest: "Hallway"
Treasury" $379.44
Voluntary dues of $10 will be collected by Ron Rose. These dues will help with continued registration of www.rssc.org webname and hosting of the website.
The following people were elected for the RSSC board for 2012:
- President: Walter Martinez.
- Vice President: Bill Douglass
- Treasury: Ron Rose
- Secretary: Jef Mangelschots and Doug Sievers
Contest
Every year in December, we hold a Talent contest. See here for more details.
Show & Tell
Walter took a Java programming class. He used his skills to develop an obscure, bug-crushing robot. I didn't really get it, but it was funny.
Rainer took the online Stanford AI class and showed an exercise on Supervised learning:

Martin is involved in a student project for building a submersible robot. The problem is how to determine the attitude of the robot, i.e. where is it pointing to. He uses an IMU sensor with 3-axis accelerometer, 3-axis gyro and 3-directional compass (minIMU from Pololu). The raw data is piped to an Arduino processor, which crunches the numbers to produce a serial stream of attitude parameters for heading and altitude.
Problem is that gyro's drift over time. Over 60 meters, the error has accumulated to over 10 meters. He is wondering how submarines are able to maintain their heading over time. There must be some mechanism for correction using landmarks.
His conclusion is that inertial sensors work to detemine attitude and heading, but not for navigation.