Dec 11, 2010
Class
"Life before and after Kinect" by Bruce Weimer

Bruce originally intended to give a lecture on indoor robot navigation with Leaf robots, but then Microsoft released the Kinect gaming device and all hell broke loose. Bruce got an apiphany and radically changed its views on how indoor robots should go about navigating around the place.
Business
Long-time RSSC member Don Fears has been sick for a while. He reportedly would be on the better hand. We all hope to see him back to our meetings. Hang in there Don.
Roboert Bearegard of the Naval Surface Warfare Centre in Norco (along the I-16 and I-91) has contacted the club in regard to an upcoming Earth Day-type outreach event in February or March, where he offers the opportunity for RSSC members to show off their robots. Jim will contact Robert for further details.
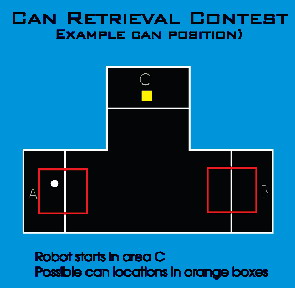
Martin Mason started a mechatronics class at his school. As a term project, his students are required to put together a robot that can compete in a can retrieval contest. More details are on his website. 3 cans of different color: red (cole), blue (pepsi) and green (mountain dew) are randomly placed in an arena. The robot's task is to search for the cans and move them to an outside area with matching color.
Upcoming contests:
- January: ???
- February: Can Retrieval
- March: Sumo
- April: ???
Upcoming classes:
- January: "Leaf Microcontroller" by Alex
- February: "Willow Garage ROS" by Rainer
- March: ???
- April: "Labview" by John Walters
New board election:
- President: Jim Uberzetsig (2nd term)
- VP: Martin Mason (1st term)
- Secretary: Jef Mangelschots (2nd term)
- Treasurer: Ron Rose (2nd term)
- Web master: Jimmie Sypolt (2nd term)
The election was swift as there were no multiple candidates. No partisanship or ideological differences. Just a plain old totalitarian system: the most efficient form of government.
Contest
It was about time to do another Talent Show. Read more about it here.
Show & Tell

Thomas Messersmidt talked about a beginners robot kit the Riverside Robotics Society is putting together for a price around $100. The kit will contain:
- a plastic base
- servo brackets
- 2 continuous rotation servo's
- wheels
- Arduino board
- experimenters board
- limit switches
- maybe IR switches
This kit would be ideal to put together sumo, line following and other robots for various contests.
Thomas also showed the Devantech SD84 servo controller he intends to use on his animatronic manaquins.
Ron Rose talked about a precise beacon finding circuit.
Bryan Trinh is a student from Walter Martinez at CSULB. For his term project he made a quadcopter. He based his design mostly on the Open source quadcopter. Here is a video of a field trial:
Here is a video where they briefly engage the rotors in the class. A friend of Brian holds the copter for safety reasons. They demonstrate that this is not simply an RC copter. It self-stabilizes when the copter changes attitude.
The copter uses Arduino controller, barometer, magnetometer, 3DOF accelerometer, 3DOF gyro's, brushless RC motors.
The copter weighs about 3.81 lbs and produces 16oz of thrust. It takes about 60% of thrust to take off. It can fly about 10 minutes on a battery charge. The software consists of about 5 PID loops.
Walter Martinez helped them secure a $1500 grant. They ended up spending $1200, so they are still looking for $300 worth of add-ons. I would say: "Party !". Brian also got an internship at Boeing out of this.
His goal is to compete in the AUVSI aerial competition.
Martin showed us 2 approaches to color sensor:
2) TCS-230 based colr sensor from Sure Electronics

This last sensor costs about $17 and has a serial interface. With a cheap USB-to-TTL interface, this can be easily connected to a standard PC.
Jimmie showed us a Leaf robot he is working on. He had problems with the motors, which have a gear ratio of 1:1, which does not give him enough toque to move the robot (see video). Alex suggested he use window motors used in cars. These work very quit, have a nice torque (worm gear) and are readily available and relatively cheap. Only thing that doesn't come with them are encoders.

