May 14, 2011
Meeting Date:
Saturday, May 14, 2011
25 people at the meeting today.
Class:
Professor Martin Mason taught the class at 11 am. Title = "Humanoids and Walking Robots"
Prof Mason has recently returned with his students from RoboGames, where they participated in a competition of walking robots. If I remember correctly, the contest was a 1-1/2 meter dash. The fastest walking robot to walk that far would win the contest.
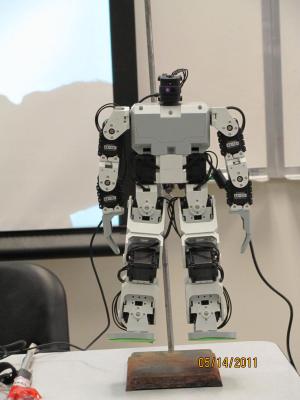
For this meeting of the RSSC, Prof Mason had the human-shaped robot hanging from a stand (he later had it walking around on the floor with an attached electrical umbilical). It was a Robotis brand "Bioloid" consisting of several model AX12+ servos, many plastic brackets, a servo controller circuit board, and a battery.
The programs for this robot consist of a list of poses: each pose being a data structure that includes the required angular position of every servo - and also the time duration before executing the next programed pose. Apparently no sensors are used to alter the program flow.
Prof Mason improved upon this by building software that displays sliders on a notebook computer display. Each slider controls some higher-level feature of the robot's walking behavior. Examples would be the time period of each stepping motion, the length of the stride, how high to raise the feet, etc. If I remember correctly there were 7 functional sliders on the PC display.
Demonstrating the robots ability to walk, he demonstrated that the robot had a "Natural resonant frequency" at which it walked best - and that attempting to make it walk faster than that made the robot appear drunk (it evertually fell down).
Business Meeting:
Discussions occured and votes were taken on a number of proposals. It was determined by vote that:
We will have a "Hallway Navigation Contest" at the June meeting.
We will participate with the Riverside Robot Club in a robot event on Saturday November 5th.
(exact location, event description remain undetermined. Possible locations include a
public library (standard meeting location for the Riverside group), or else at the
Columbia Memorial Space Center in Downey. Lots of coordination activity is required
before any of this is likely to happen)
Upcoming classes:
June: 2D Indoor Navigation Hallway Navigation w/ROS by Rainer H
July: Infra-red Distance Sensing by Ron Rose
Show and Tell:
Turtle Bot from Willow Garage:

Martin Mason has built one. Officially they aren't available yet from Willow Garage. It's a differential-drive mobile base with shaft encoders (iRobot Create base unit) with a superstructure built on top to mechanically mount a computer mother-board and a Kinect sensor. Ubuntu brand of Linux operating system installed on the motherboard.
Ron Rose gave a presentation on using a infra-red remote control integrated-circuit to measure the distance to a reflective object. He presented some electrical circuits, formulas, and information from the data sheets for integrated-circuits TSOP41/43 and also for TSOP5P.
These integrated circuits are intended by their manufacturer to be used as the receiving element for remote control of household appliances. Each integrated circuit includes the optical wavelength filter, the optical lens, the photodiode, the transimpedance amplifier, the 38KHz bandpass filter, the integrator, threshold circuit, and logic-level driver circuit.
The suggested method for measuring the distance to a reflective object is to build a 38KHz oscillator that blinks an infra-red emitting diode. The time delay between emitting the 38KHz infra-red flashes, and the logic-level output from the integrated-circuit is suggested to be a function of the distance to the reflective object.
The time delay is in the range of: 80 to 240 microseconds, which is 3 to 9 periods of the 38KHz.
John Davis gave a presentation on his RoboMagellan entry in the RoboGames event.




Dan Mornis gave a presentation on his robot modification to a radio-controlled model car.
Tim Lewis demonstrated a design and construction project of his, a LED-display timer box, suitable for many types of events.