March 8, 2014
You can visit our previous detailed Meeting Minutes here: http://rssc.org/meeting-minutes-index
10:00 - 11:00 Leaf – Special Interest Group (SIG) http://www.leafproject.org/
Dr. Bruce spoke about using a quad copter as a platform for Leaf. Bruce got a new ARDrone 2.0 http://ardrone2.parrot.com/ quadcopter that is ROS http://www.ros.org/ compatible. Bruce demonstrated the quadcopter being controlled by his cell phone and also the automated capabilities of the Ardrone 2.0. There is an SDK available for the Adrone 2.0. The demo included source code to read sensor and using a joystick in ROS.
11:00 - 12:30 John Wright from NASA - JPL - Mars Rover Driver gave us an almost 2 hour presentation on the current status of Curiosity the Mars Rover. He talked about the concerns with how long the wheels will last as they are made of a thin metal and they can crack or bend as the Rover runs over sharp rocks. John also spoke about the daily planning process for the Curiosity Mars rover




12:45 - 1:00 Business Meeting, we had Caprice Spencer Rothe (she was the Hands of E.T) visiting us, National Robotics Week April 5-13, 2014 W e will participate in National Robotics Week at the Sea Base in Long Beach in conjunction with http://sharedsciencefun.org/ from Long Beach. www.nationalroboticsweek.org/events.php
1:00 - Sumo Robot Contest
------------------
Trial Number
,-------,-------,-------,
Robot Name | 1 | 2 | 3 |
----------------+-------+-------+-------+
Sensibility | x | x | x |
+-------+-------+-------+
| x | x | |
----------------+-------+-------+-------+
Mini-Rocky | - | - | - |
+-------+-------+-------+
| - | x | x |
----------------+-------+-------+-------+
Doug | x | x | x |
+-------+-------+-------+
| x | - | - |
----------------+-------+-------+-------+
M R | - | - |
X => won
- => lost
Winners
-------
1st Place | Sensibility | Sergie Grichine
----------------+---------------+-----------------
2nd Place | Mini-Rocky | Alex Brown
----------------+---------------+-----------------
3rd Place | Doug | Doug Bitlner






 Show and Tell
Show and Tell
-------------
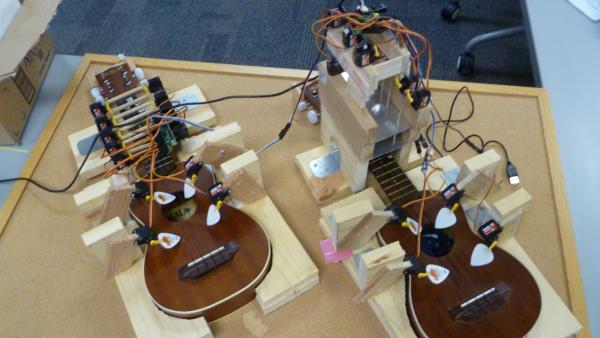
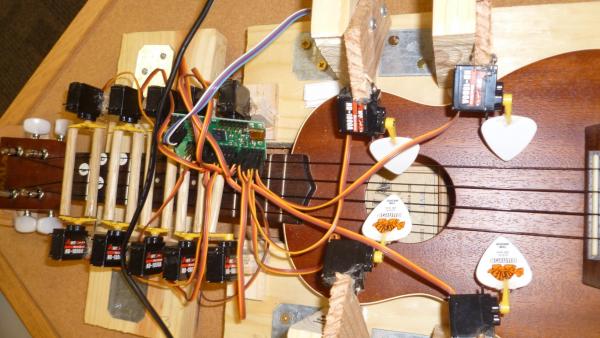
The amazing young Akira Higaki demonstrated his two computer-controlled ukuleles. He has attached servos that pluck the strings, and has attached other servos that press the strings down onto the ukulele fingerboards to select individual musical notes. Demonstrations included a popular tune automatically played on both ukuleles. Akira did this as a school project and is competing nationaly. He uses products from Pololu. Check it out! http://www.youtube.com/watch?v=HEWzjGgrpzg



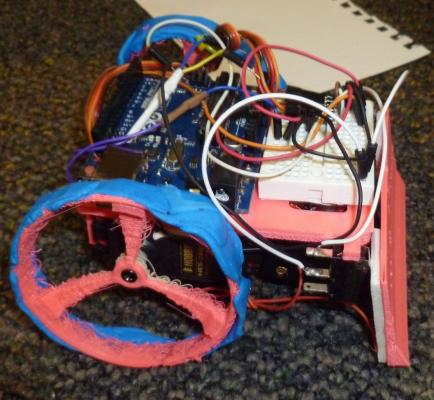
Sergei demonstrated his custom made self balancing robot.
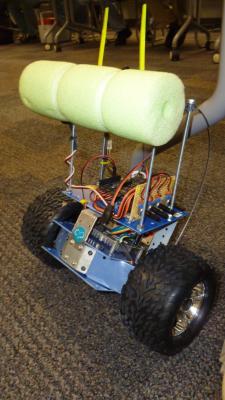
Sergei: Most parts come from http://www.dfrobot.com/ - I bought many things (components, motors) from them and they are very reliable, quality is good. Delivery time 10-25 days, usually on the low end – China post.
They sell a kit http://www.dfrobot.com/index.php?route=product/product&path=37&product_id=1043 - I bought the 6DOF mini shield and their motor controller to make my bot, as I had everything else. I downloaded and modified their Arduino software (my version attached).
At the moment I am trying to make the bot remote controlled using BLE-Link, http://www.dfrobot.com/index.php?route=product/product&path=45_79&product_id=1073 - they do have iOS and Android source code for the controller side, you need to compile-install it (i.e. be an iOS developer or install Android toolset). The other module - Bluetooth Bee – might have been a better choice. There are many other options of course.
There is a Wowwee MIP balancer robot for those who want no hassle – now sold in Best Buy stores:
http://www.bestbuy.com/site/promo/mip-robot-121206?DCMP=rdr121534&utm_source=miplp&utm_medium=ppc&utm_campaign=launch