June 9, 2012
Business Meeting
Old / New Business
OC Maker Faire : By popular vote, the July 14 meeting will be held at the OC Maker Faire.
For full details of the OC Maker Faire, please see www.OCMiniMakerFaire.wordpress.com
- Who: RSSC, and 34+ other maker groups
- What: We'll have a booth. Bring your creations!
- When: Saturday, July 14, 10am - 5pm
- Where: Beall Center for Art + Technology, UC Irvine ( directions )
- Why: Because it will be cool!
- How: Buy tickets ( link ), arrange a carpool, bring your robots, and we'll see you there! Bring extra cash for parking ($10/day)
IWAH Trophy : It was voted that Jim and John would share the honor of the IWAH for the next two months, as consolation prize for the Hallway Contest.
Announcements / Reminders
Richard Vannoy from ITT Tech in San Diego gave us a visit. Richard teaches robotics, and is eager to revive the San Diego Robotics Society. He would love to get our involvement in competitions with his students, who typically have Capstone projects that result in competition entries. He's hoping to have one major competition per quarter.
OC Mini Maker Faire : Bequi, who is an organizer of the Faire, came to visit our group, and convinced us all to get a booth at the Faire, and we all loved the idea. As a result, we'll be holding the July meeting there (see above). Bequi was even kind enough to highlight her visit on her Maker Fair Blog : http://ocminimakerfaire.wordpress.com/2012/06/11/robotics-society-of-southern-california/
Riverside Robot Expo : This year it will be on November 3rd (tentative?). Please contact Thomas if you have anything that you would like to show. Also, any contacts that you have in academia or industry who are involved with robotics, we would love for you to try to get them involved!
Upcoming Classes (11:00 – 12:00)
| Month | Class | Presenter |
| July 14 | None - Meet at OC Mini Maker Faire (see above) | -- |
| August 11 (tentative) | Class on ROS & Arduino (tentative topic) | Rainer |
Upcoming Competetions:
October - Bipedal robot competition
Bipedal competition, due to lack of formalization, and many working on their hallway competition entries, has been moved back to October. Guidelines may be based on RoboGames (http://robogames.net/rules/biped.php) or perhaps a freestyle competition.
December - Annual Robot Talent Show
Hallway Contest
1st Place : Rocky, by Alex
Alex's robot successfully navigated the hallway using a wall-following algorithm, with help of a laser range-finder. He received the fastest time, and returned to the starting position less than a foot away!

Here's some video footage of Rocky getting started, and navigating the tougest part of the hallway:
2nd Place : Woody, by Doug
Doug's entry used IR sensors and odometry / dead reckoning to follow the wall successfully. He ended up over the 5 minute time, and about 20 feet short of the starting point.

Here's a short clip of Woody getting started... first find the wall, then follow it!
3rd Place : LSR, by Phil
Phil's robot, LSR, used a similar strategy, using IR sensors to follow the wall, and odometry to determine distance. However, LSR was a little slower, and went about 20 feet past the start point.

Here's a very brief shot of LSR getting started. Sorry for the brevity, I had a lot of heads in the way and not enough charge on my phone!
IWAH Trophy Winners :
HN, by Jim, got a little confused in the doorways

Lornus falle, by John, was doing quite well, until it got into the elevator section of the hallway, and appeared to try taking the elevator.

Show and Tell
Martin
Martin gave a quick announcement about the Cal State Fullerton autonomous lawn mower project, which he is involved with. They competed in this year's ION competition in Ohio, and won 1st place! According the CSU Fullerton website:
"Seven electrical engineering students won first place in the "static competition" at the ninth annual Institute of Navigation Robotic Lawn Mower Competition May 31-June 2 in Beavercreek, Ohio. The team also received the "Fantastic" Award for incorporating the most fans on the robot to make it "cool," the "Overclocked" Award for efficiently using computing technologies on a lawn mower and "Zero-Degree Turn" Award for making perfect zero-degree turns on the field. The goal was to design and operate an autonomous lawn mower using the art and science of navigation to rapidly and accurately mow a field of grass. Team members are: Michael Yeh, Bao Nguyen, Tuo Wu, Riyad El-laithy, Jared Chen, Minh Tran and Vy Phung; faculty adviser is Jidong Huang, assistant professor of electrical engineering." (Source http://calstate.fullerton.edu/archive/briefs/2012/06.aspx )
You can see video of the lawnmower in action prior to the competition on YouTube : http://www.youtube.com/watch?v=zG97_9YpoBA

Martin M.
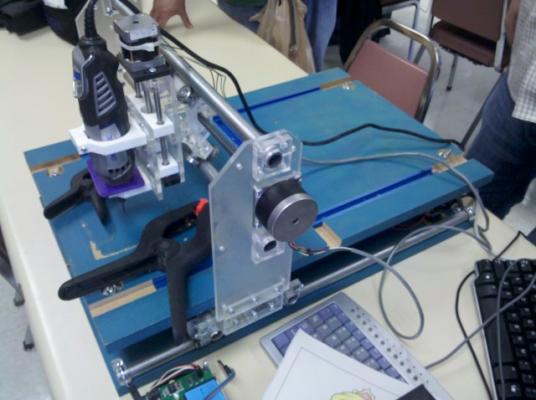
Martin showed off and demoed a CNC Dremel router that he had built off of designs from the BluuMax website ( bluumaxcnc.com ). Martin said it cost him about $400 to build (however this may not have included the stepper motors). On the website there are links to purchase some of the components, as well as shortcuts to websites where you can download free software for generating G-codes and for controlling the machine.
Bill
Bill is one of the lucky people to receive one of the first Raspberry Pi boards. He has a Type B unit, which is the size of a credit card, and is a full PC with 700 MHz processor for only $35. He gave a brief update on the hardware, and notes that there are currently 4 versions of linux that will run on the board, including Debian Linux. Also, there is a ROS port in progress, and a list of recommended peripherals on the website. For more info check it out here ( http://www.raspberrypi.org/ )
Bob
One of the cool robots on display was a re-engineered Roboscout shell that was picked up at a swap meet for a low price. Although it was not fully functional, it provided a great platform for adding new functionality. The head was replaced with, as almost everyone can guess, a body massager that contains two webcams for eyes. It also has two arms, each one with an ultrasonic sensor, mounted on 3 rpm gear motors. One has a gripper made with Lynxmotion parts, and the other is a custom designed claw. One (or perhaps both) arm has an inclinometer, which allows the angle respect to horizontal to be sensed directly over the I2C bus. The servos are driven by an Arduino Mega that has 54 channels.

Martin M. (again!)
Prof. Martin also displayed a BOE-Bot clone, that uses a PCB that he designed that includes an Arduino controller, as well as the breakout connectors and prototyping area normally found on the Board of Education. His goal is to make low cost platforms that students will be able to take home, or purchase for a very low price. He also replaced the expensive BOE-Bot frame with a piece cut on the CNC Dremel pictured above. You can check out more on his blog at ( http://profmason.com/?p=1870 ).

Dr. Bruce
Dr. Bruce quickly gave an update on Leaf 2.0. Despite some challenges, the Phidgets ROS package was finally compiling, and he hopes to get some phidgets working soon.