July 9, 2011
Class
Today's class "IR distance sensors", by Ron Rose
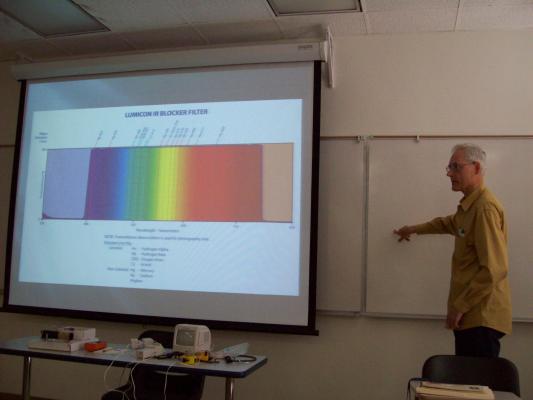
He talked about the TSL245R sensor.
This sensor has a voltage output or a frequency output.
It is meant for indoor use, because outside conditions (bright summer day), will oversaturate the output.
The solution for this is to reduce the field-of-view (e.g. toilet paper roll).
The difference with an IR diode is that you do not have to design your own OPAMP circuit to go with it. Everything you need is already nicely packaged up for you.
Jim mentioned an anecdote for a robot he built, that was used ceiling lights for navigation. His robot had angled sensors to detect the ceiling TL lighting. The problem he faced was that it was picking up reflections from the wall. A solution could have been by taking into account the flicker-rate from the TL lights.
Business
August class will be a "VEX workshop" hosted by Paul Ashley. Class starts at 10am.
September will host a "ROS Workshop" hosted by Martin Mason.
October will be a follow-up on the previous ROS Workshop.
Show & Tell

Sergei talked about his robot TrackRoamer.
It uses a PIC18LF4550 processor, connected via USB to Microsoft RDS service.
It has an I2C Accelerometer, compass, 8 IR sensors.
He uses
Bruce talked about ROS. He pointed out the various ways that ROS can be installed. He preferred Wubi to install Linux natively in a dual=boot configuration on a Windows PC.
Gene Ruebsamen talked about AI in robots, particularly on Genetic Algorithms. He uses this to accelerate teaching a neural net to establish its internal connections.
Interesting quote by Yogi Berra: "In theory, theory and practise are the same. In practise, they are not !"
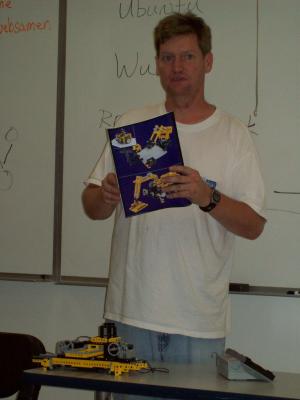
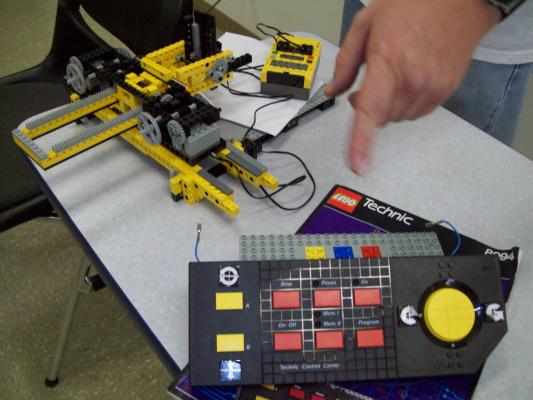
James showed a predecessor to LEGO RCX.
Thomas showed us the Devantech SD84 servo board that he like to use on his android projects.
Robert Ashford talked about his RepRap 3D printer. He uses Open SCAD for solid modelling.