Jan 8, 2011
Class
Alex Brown gives more details on the Leaf robot microcontroller board. Everything you ever wanted to know about the Leaf project, you can find here.
Leaf is a project started by Bruce Weimer, Alex Brown and Robin Hewitt to develop an intelligent indoor robot platform with a personality. If the thing appears to be a smarty pants sometimes, we have Bruce to blame for this. That a Leaf robot's got an eye out for you is the fault of Robin. But if you ever find a Leaf robot chasing you down the hallway, is because it has a microcontroller board interfacing with the motors and sensors. This board was purpose designed and built by Alex. Today's class is about this microcontroller.
- More on the Microcontroller board itself
- the microcontroller manual
- Microcontroller software
- Nav & Control software
The microcontroller used is an MC9S12DP256, which is a 16-bit microcontroller based on the HC11.
Business
- Treasury report: $440.44
- February class: Robot Operating System by Rainer Hessmer
- February competition: CAN retrieval organized by Martin Mason
- March class: Martin Mason on Navigation and Localization
- April class: John Walters on Labview
The RSSC club was contacted by Robert Beauregard of Naval Surface Warfare Centre in Corona to find participants to show robots at their upcoming event in May.
Jim called out for participants in the Get-Me-A-Beer-Challenge.
Martin provided more information on next month's Color CAN competition.
Bill Douglas suggests to attract new members by offering introductory classes to build robots. The club decided to add an extra hour to the 2nd Saturday meeting to give a robot building class. THis extra hour will start at 10am and last 1 hour, followed by the regular 11am general topic class.
Henry Arnold suggest as the first project to build the ESCAPE robot kit, which he succesfully used to teach kids about robot building in his 4H classes.

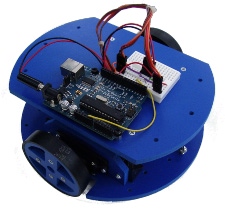
Another robot to be build is the Ardbot by Budgetrobotics.com:
Martin announced the 2011 Robotics: Science and Systems conference is held at USC. Attendance is $120 and is held between June 27 and June 30. Usually there is a demonstration of all particiapting robots on the final day. Martin would invstigate the possibility for club members to attend this last demonstration.
Contest
This month, we held a Robosumo contest. Read all about it here.
Show & Tell
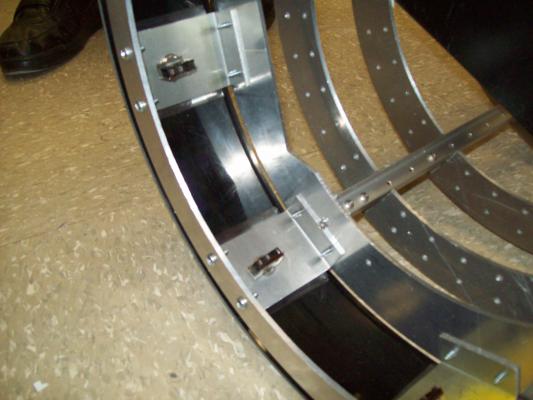
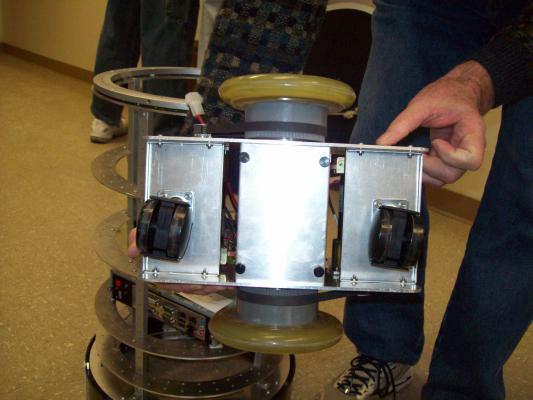
Henry Arnold showed his progress on his Leaf robot. He uses 8 inch Aluminum (bought at aluminum surplus store at $2.5/lbs) which he cut on his milling machine. His previous robot he made with a sabresaw and file, which was very labor intensive. His target weight is 25 lbs. For the brains of his computer, he uses a car computer chassis with a Mini ITX motherboard, which costs about $200 and sports the popular Atom processor. To control the robot, he opted for the Leaf microcontroller board, designed by Alex Brown (see above).
For the wheels, he uses replacement wheels for an electric razor scooter (about $5).
He uses the Acroname SRF04 range sensor.
For batteries he uses NiMH because LiPo batteries are prone for catching fire.
For power supply he uses a car DC/DC voltage regulator that puts out 12V for the computer, a separate 5V for the sensors. The motors are directly fed by the batteries. THis should ensure a stable power supply. Such a voltage regulator goes for about $79.




Alex Brown has been on a lifelong quest to develop a solid navigation system for the Leaf robot. He incorporated several navigation sensors on the Leaf microcontroller (compass, acceleromets, gyro's, encoders, ...). Integrating all these sensors and using them for localization and navigation from theground up is damn hard. Many PhD students have grinded their teeth on it.
Then came Willow Garage with their PR2 robot and the open source Robot Operating System (ROS). The latter turns out to be a godsend for the Leaf project. Finally it offers the capability to adopt complex navigation algoritms already implemented in a robot control framework that can be adapted for the Leaf robot architecture.
Alex still struggles with the approach to take. ROS is primarily Linux based. The Leaf project uses a couple critical components which are still Windows-based: Roborealm, MS Speech engine and the AI module implemented in Lisp on LispWorks.
He's thinking about installing ROS on a Virtual Machine (e.g. VMware or VirtualBox) and running this on the same laptop that runs the Windows components of Leaf.
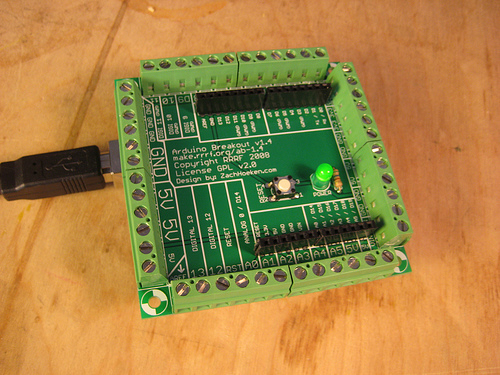
Martin talked about a breakout shield for Arduino.
He also mentioned that Texas Instruments is pushing its MSP430 line of microcontrollers with an ultracheap development board ($4) called the Launchpad.
Tim Lewis showed a digital display board he is working on. Hen mentioned a relay board he found at Virtual Village.
