Feb 12, 2011
Workshop
As decided in the last meeting, we started an hour earlier (at 10am) to hold a robot building workshop. This initiative should attract more people and entice them in building robots. The ESCAPE robot was selected as our first project. This is a fantastic Daddy&Me project. My 9-year old daughter got here first soldering experience with it. Even my 5-year old boy loved helping us out by feeding the solder wire (I didn't want him handling the iron yet). Many thanks to Henry Arnold, who brought the tables, soldering irons and tools.




Class
For this month's class, Rainer Hessmer gave a lecture on "Introduction to ROS".
He also keeps a blog, describing his work as he advances his knowledge of ROS:
- Sending data from Arduino to ROS
- ROS introduction class with Ardros
- Ardros - dead reckoning
- 2D SLAM with ROS and Kinect
Another club member Martin also documents his experiences with ROS on his blog:
Also read this report on previous lectures given on the Kinect sensor, which turns out to be a crucial part in indoor navigation with ROS.
Business
April class: Labview by John Walters
May competition: Find the wall outlet
Martin Laroque asked for volunteers at the upcoming Institute Of Navigation (ION) Southern California chapter Mini Urban Challenge competition for high-school kids using the LEGO Mindstorm NXT robot kit. The competition is for March 4 and 5.
Contest
This month's contest was just awesome: The color can competiton yielded a lot of attention.
Show & Tell

Andy, the team spokesman for the winning entry 'Waldo' talked briefly about the design of their robot.
For the color sensor, they use 3 alternatingly lit color LED's in a tube, driven by a PIC chip. The reliability of this sensor not surprisingly depended highly on the distance.
For navigation they used the simple 'bouncing billiart ball' approach: go straight in any direction until you hit the 'wall' (black line on the gorund), then head of in an arbitrary other direction until your range sensor picks up an obstacle.
THe software is multithreaded and consists of 3 threads:
1) main thread
2) scanning search
3) line detection

For the claws, it uses 2 servo's.
The second place winner was "Baby Scoprion". They used a different color sensor. They experienced problem mapping the area because of wheel drift. They did not use quadrature encoders. This could be improved by using spray-on rubber to improve traction. They concluded that the 'bouncing billiart ball' approach used by Waldo would be easier to implement and yield better result.
Rainer won the Salea Logic analyzer in the 2010 Talent Show. He is willing to lend it to any club member that request it. Send him an email to arrange an exchange. Please play it fair and return the logic analyzer after a reasonable period to give others the oppertunity to experiement with it.
Rainer talke about the problems he had with the quadrature encoders on his Arduino controlled robot and described a soluton. Here is the write-up on that.
Here are a couple internet links on this problem:
Alex talked some more about his exploits in adapting ROS to the Leaf platform.
He demonstrated his Leaf robot Rocky, which runs a basic ROS configuration where he can control Rocky either by wireless joystick (interfaced by a joystick node in ROS). Rocky can also be controlled by voice throught the Lisp program specially developed for Leaf by Bruce Weimer. The different ROS nodes communicate to each other over sockets. This allows ROS nodes to be distributed over different platforms.
Martin Mason talked about an alternative to the traditional Zigbee wireless communication technology: the cheap serial bluetooth module from Sure Electronics. it costs $20 and works at 115kbaud. it can interface directly to an ATmega but not to a PICAXE because that one has a weird inverted serial logic.
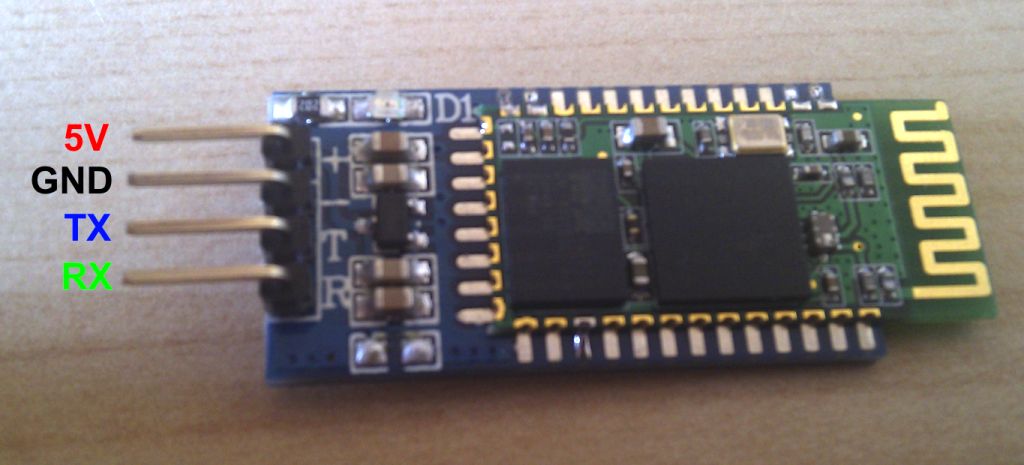
Here is a write-up on this component.
He also mentioned that he Maxbotix sonar sensor has 2 ways of interfacing: analog and serial. The analog interface is limited by the A/D resolution of your microcontroller (which is typically 10bit).
Beware when using the serial interface which is not RS232 but TTL with inveted levels (needs to be inverted).
Finally Martin also mentioned the Venus 10Hz GPS module from Sparkfun:
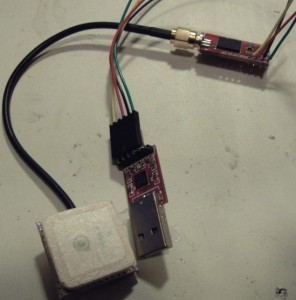
It performs bad at startup, but improves after running for a while. He recommends getting a powered antenna.