April 8th, 2011
Class:
10am: soldering workshop

A follow-up soldering workshop was organized, which allowed us to work further on the project we started the last time.
Not everyone was interested, but I can tell you that those two workshops, together with someDaddy-supervised sessions at home has turned my daughter into a seasoned soldering expert (well, now at least she knows which end of the soldering iron to hold).
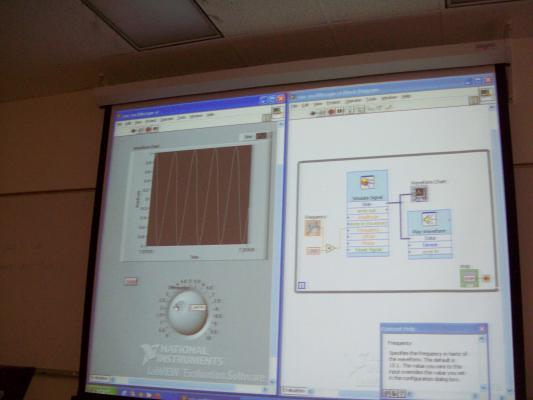
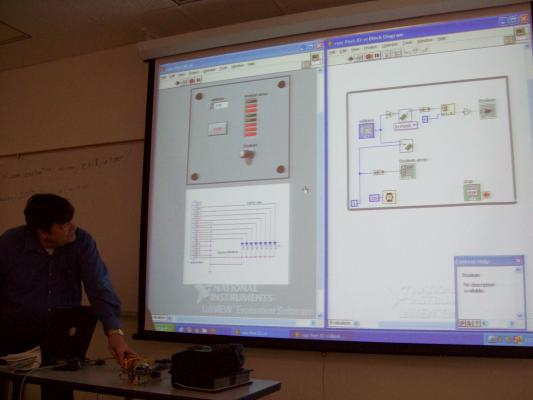
11am: Labview by John Walters
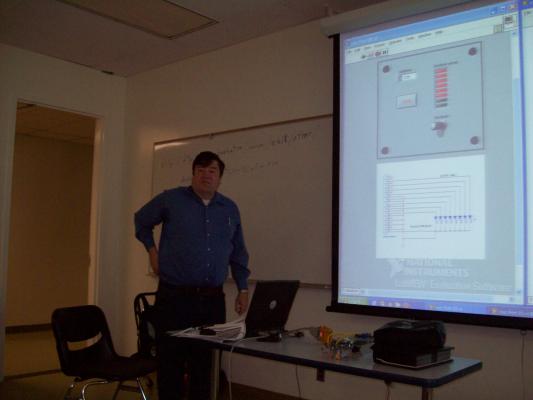
John Walters gave a tutorial on how to use Labview software development kit to give his hallway navigating robot its smarts.
Follow this link to download the evaluation version.
Business:
Bill Douglas made an appeal for all men to get their PSA tested to allow early detection of prostate cancer. It can save your life.
Show & Tell:

Tim Lewis showed an Event Clock he is working on.

He also showed us a bright LED with a 6-wire interface to control a bright LED. YOu can chain up to 255 is series and control each individually. You can control it color and intensity with 8 bits per color.
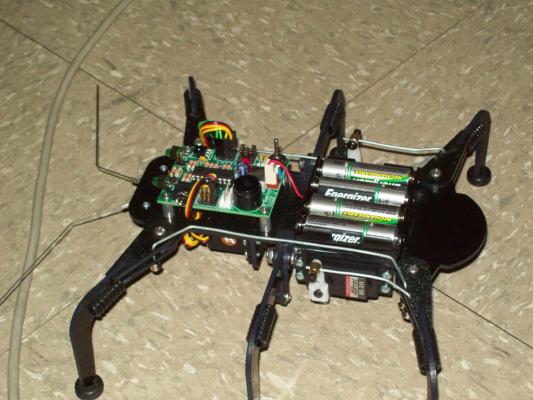
Henry Arnold built a new, cheaper and simpler version of his Cricket robot. The price has been dramatically reduced from $200 to a couple dozen dollars. He is finalizing the manuafacturing and the price. The new version is now made from laser-cut ABS plastic.
The robot can be controlled with a Sony-compatible remote control.
Shuvo gave a small presentation on Cloud computing. Communication Latency is the biggest problem when using Cloud Computing to provide superior brain capacity to a robot. The reasoning for Cloud Computing would be to use it for cognitive robotics and AI. An attached desktop style PC (e.g. Netbook) can run ROS (interfacing to Kinect and Laser), translating high volume data stream to low volume information, which can be streamed to offline CLoud Computing nodes for further processing. Microcontrollers interface directly with sensors and actuators.
Some Cloud technologies:
1) Google IOIO
2) Amazon S3 Services
3) Microsoft AZURE
4) Google App Engine
UCSB offers free Cloud Computing nodes called Eucalyptus.

Walter Martinez talked about his attempts to get a good ROS development platform.
On his netbook, Windows 7 with Ubuntu installed on VMWare proved to be too slow.
He installed Ubuntu on a bootable USB stick (32Mb) and that worked from him.
He also tried a Netbook computer and installed Ubuntu on an SD card. That also worked.

John Davis showed us his RoboMagellan robot, which is pretty much ready.
He uses Ubuntu installed natively on a Netbook and uses gpsd, to interface with his GPS, so that he does not need to parse the NMEA stream himself.
During the conceptualization, he switched from a Beagleboard to a Netbook computer.
Some lessons learned are:
1) a low-res camera is sufficient to find the orange cone
2) potential diverse navigation techniques: wheel encoders and/or rate gyro
3) best strategy: use GPS to acquire general position. Use a compas to turn to correct heading, based on own location and that of target. Use a rate gyro to mantain heading while driving to target. When close by, use capera to find the orange cone.