B.E.A.M. Robotics
by Arthur Ed LeBouthillier
This article was published in the December 1999 issue of The Robot Builder.
B.E.A.M. robotics has arisen as a new approach to building robots. Its primary originator, Mark W. Tilden, has developed a robot design philosophy which is very different from traditional robot-building techniques, emphasizing a minimalist, evolutionary design approach.
Principles of B.E.A.M.
B.E.A.M. is an acronym for Biology, Electronics, Aesthetics, and Mechanics. It stands apart from most other robot building strategies because it emphasizes a no-computer, minimalist approach based on insect-like nervous systems. Rather than
concentrating on trying to make a computer do the abstract thinking that living things like humans do, it instead calls for mimicking the neuron-level circuitry of the lowest levels of living neural systems. The emphasis is on trying to build reflexive, stimulus-response systems more like a vertebrate’s spinal cord than its brain. As Brian Bush says in the B.E.A.M. FAQ, “the basic principles of BEAM rest on the fact to build smart machines one must first build a smart body.”
Nervous Nets
The simplest processing elements in a B.E.A.M. robot are the Nervous (Nv) and Neural (Nu) neurons; an Nv is a motor driving element and an Nu is a signal processing element. According to Mark W. Tilden, founder of the B.E.A.M. approach, Nu’s and Nv’s are “… real-time non-linear analog control system emulating a low-level peripheral spinal system. Based on arrays of
sequential RC (Resistor-Capacitor)-time-based pulse delay circuits in closed loops, a Nv net is any circuitry that can act as a media for sustaining independent control ‘processes.’” The basic element of an Nv or Nu is a schmitt-triggered inverter with
an RC timing circuit or similar circuit. Schmitt-triggered means that the inverter has a strong threshold before it fires; this helps to ensure a clean oscillating behavior in a circuit. Figure 1 shows a simple Nv or Nu circuit.

By combining these Nv’s into simple feedback circuits, different kinds of sophisticated behaviors arise. One reason for the sophistication is the feedback caused on the circuit by motor loads. Since drive motors have a different resistance when
a load is applied, they become both actuators and sensors. This feedback can be anticipated by the designer so that the feedback causes adaptive behavior.
Multicores
Nv’s and Nu’s are combined into larger control circuits called multicores. Depending on the number of Nv’s and Nu’s in the system, they are known as monocores, bicores, tricores, quadcores, quincores, hexcores, septcores, octocores and so on. These kinds of circuits become coordinating circuitry between several motor elements and thus bring about certain patterns of motor behavior.
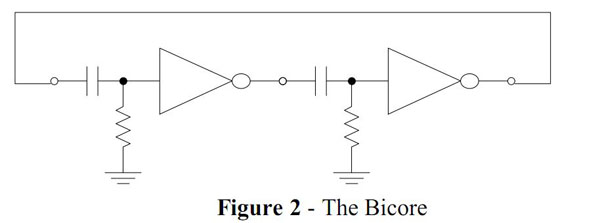
They can be combined in leg-control or wheel-control systems to produce capable moving mechanisms which react to their environment. One of the simplest multicores is the bicore. The bicore puts two Nv’s together to form a closed-loop motor driving circuit. Motors could be attached to the output of each Nv. Multicores are similar to control elements biologists
have found in animal muscle control systems called Central Pattern Generators (CPG). A CPG is a neural circuit which produces coordinated muscle patterns. Biologists have identified numerous kinds of CPG’s in various creatures. Lobsters, for example, have numerous CPG’s that control the walking or resting posture. Like CPG’s, multicores act as an adaptive sequencing control over the robot’s legs or wheels.
Biomorphs
B.E.A.M. enthusiasts envision building robots which are near-living machines which they call biomorphs. As Mark Tilden and Brosl Hasslacher say in Living Machines: What is different about biomorphic machines from typical mobile platform designs is not their materials base but how they are organized. They use a dynamical, non-symbolic internal world representation and compliant, bi-directional, interactive response where the external world assumes a crucial role. In this they have much
in common with biological forms which is not accidental; these machines are designed along biological paradigms rather than on first principle notions of how such machines should be organized.
Tilden and his associates have produced dozens of different biomorphs over the years. These range from very simple 2 neuron creatures to complex biomorphs with over a dozen neural elements. These robots are not programmed in the way that
microprocessors are, but rather are designed using the Nv and Nu circuitry to have propensities towards certain kinds of behaviors. Often, the actual behaviors which spontaneously arise are far different from those anticipated by their designers.
Summary
B.E.A.M.is a robot design philosophy which stresses building life-like mechanisms using neural-like circuitry. Utilizing loops of pulse-forming devices, complete adaptive control systems are formed with very few components. This is similar to
mechanisms found in creatures such as insects and lobsters. These machines evidence emergent behaviors which are sometimes sophisticated and often unpredictable. They can be fascinating to watch and learn from.
References