Abstract
The objective of this project is human-robot collaboration, using an assistive manipulator to complete a task. The project will use on of the available robotic arms in the lab as a platform for assisting a person in completing a task that requires more than two hands. The project will incorporate computer vision, obstacle avoidance, and machine learning.
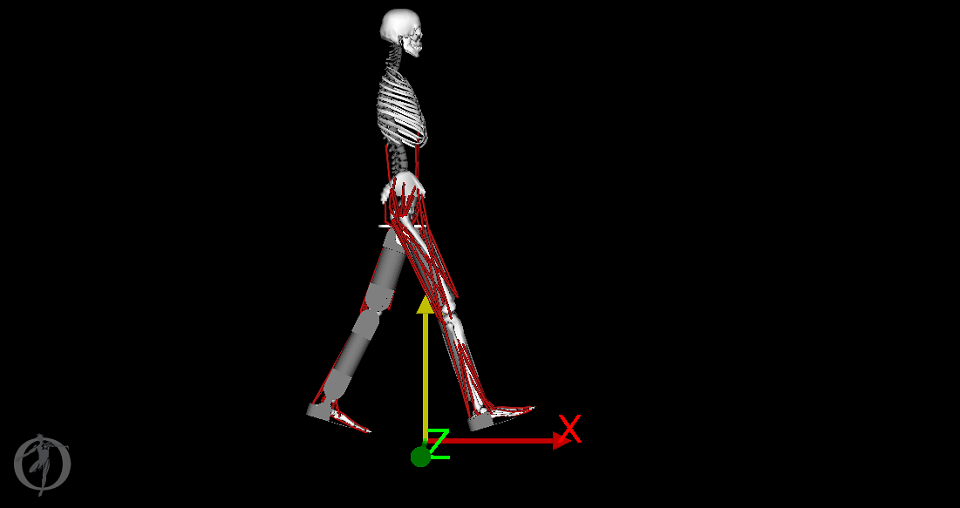
The Honda Project: In addition, over the course of research work Joaquin will be managing the project of importing an
assistive walking device into Opensim. This device is a model related to the prototype Honda assistive walking device. Tasks include:
♦ Modelling the device
♦ Importing and scaling to the appropriate Opensim model
♦ Integrating correct mass and inertial properties for the assistive device
♦Getting inverse kinematic data on the assistive device and determining its effectiveness
in assisting with walking